Policy Gradients: REINFORCE from Scratch
Deep dive into Policy Gradient methods, specifically REINFORCE deriving the mathematical foundations as well as the implementation from scratch.
Deep Reinforcement Learning (DRL) enables agents to learn optimal decision-making through trial and error in high-dimensional state and action spaces.
Policy Gradient methods like REINFORCE directly optimize an agent’s decision-making strategy by adjusting the parameters of a policy network, making them an on-policy reinforcement learning method, to maximize the cumulative reward.
REINFORCE is one of the simplest yet most fundamental policy gradient methods, making it an ideal starting point for grasping Deep RL theory, laying the fundamental groundwork for more advanced deep RL algorithms.
The Reinforcement Learning Objective
An agent interacts with an environment over discrete time steps.
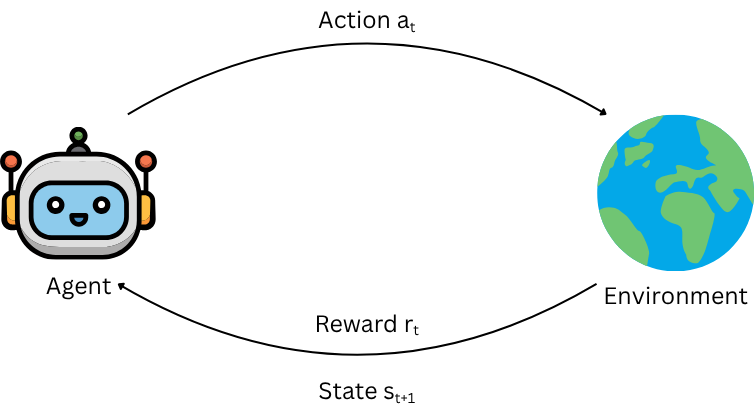
At each step $t$ the agent observes the current state $s_t \in \mathcal{S}$, takes action $a_t \in \mathcal{A}$, subsequently receives reward $r_t \in \mathbb{R}$ and is transitioned to the next state $s_{t+1}$ by the environment.

The agent's behavior is defined by a stochastic policy $\pi_\theta(a|s)$, which gives the probability of taking action $a$ in state $s$, parameterized by $\theta$.

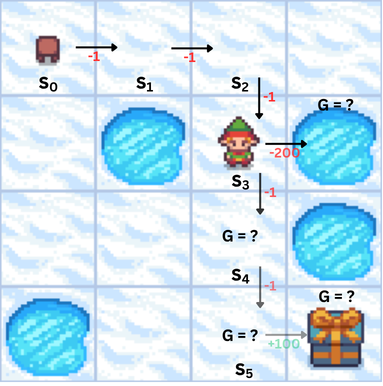
From Rewards to Total Return
The agent’s objective is to maximize the total reward it receives over time, the return $G_t$. The return $G_t$ is the sum of rewards from time step $t$ onward:
$$G_t = r_t + r_{t+1} + r_{t+2} + \dots + r_T$$
But future rewards are often discounted. Why?
- Temporal Uncertainty: Future states and rewards are less certain (e.g., environment changes, agent timeout)
- Time Preference: Immediate rewards are often more valuable than delayed ones (e.g., economics, biology)
- Convergence Guarantees: Ensures the return (sum of rewards) remains finite in infinite-horizon problems
- Policy Stability: Encourages agents to prioritize near-term actions over distant, speculative ones
In essence, discounting helps to balance exploration and exploitation while making optimization tractable.
So, we use a discount factor $\gamma$ (where $0 \leq \gamma \leq 1$):
$$G_t = r_t + \gamma r_{t+1} + \gamma^2 r_{t+2} + \dots + \gamma^{T-t} r_T$$
From Total Return to Expected Return
The agent’s goal is to maximize the expected return (average total reward over many episodes):
$$J(\theta) = \mathbb{E}_{\tau \sim \pi_\theta} \left[ G_0 \right]$$
where $\tau$ represents a trajectory (sequence of states and actions), $\pi_\theta$ represents the policy (parameterized by $\theta$) and $G_0$ represents the total discounted reward from the start.
Deriving the Policy Gradient
The expected return $J(\theta)$ can be rewritten as
$$J(\theta) = \mathbb{E}_{\tau \sim \pi_\theta} \left[ G_0 \right] = \int_\tau P(\tau|\theta) G_0 d\tau$$
since $\pi_\theta$ represents a probability distribution, where $P(\tau|\theta)$ is the probability of trajectory $\tau$ under policy $\pi_\theta$.
Trajectory Probability
The probability of a trajectory $\tau$ is defined as
$$P(\tau|\theta) = P(s_0) \prod_{t=0}^T \pi_\theta(a_t|s_t) P(s_{t+1}|s_t, a_t)$$
where $P(s_0)$ is the initial state distribution and $P(s_{t+1}|s_t, a_t)$ is the environment dynamics (transition probability).
Gradient of the Objective
We want to find $\nabla_\theta J(\theta)$ w.r.t. $\theta$, which can be written as:
$$\nabla_\theta J(\theta) = \nabla_\theta \mathbb{E}_{\tau \sim \pi_\theta} \left[ G_0 \right] = \nabla_\theta \int_\tau P(\tau|\theta) G_0 \, d\tau$$
Since $G_0$ does not depend on $\theta$ (it is a function of the trajectory $\tau$, not the policy parameters), we can bring the gradient inside the integral.
$$\nabla_\theta J(\theta) = \int_\tau \nabla_\theta P(\tau|\theta) G_0 \, d\tau$$
The Log Derivative Trick
Recall that for any probability distribution $P(\tau|\theta)$, the following identity holds
$$\nabla_\theta P(\tau|\theta) = P(\tau|\theta) \nabla_\theta \log P(\tau|\theta)$$
This is due to the fact that $\frac{d}{dx} \left( \log x \right) = \frac{1}{x}$, with which we can similarly define $\nabla_\theta \log P(\tau|\theta)$
$$\nabla_\theta \log P(\tau|\theta) = \frac{\nabla_\theta P(\tau|\theta)}{P(\tau|\theta)} \implies \nabla_\theta P(\tau|\theta) = P(\tau|\theta) \nabla_\theta \log P(\tau|\theta)$$
This we can substitute back into the gradient of $J(\theta)$, yielding:
$$\nabla_\theta J(\theta) = \int_\tau P(\tau|\theta) \nabla_\theta \log P(\tau|\theta) G_0 \, d\tau$$
We realize this again is an expectation as $P(\tau|\theta)$ is again a probability distribution of trajectory $\tau$ under $\theta$, hence
$$\nabla_\theta J(\theta) = \mathbb{E}_{\tau \sim \pi_\theta} \left[ G_0 \nabla_\theta \log P(\tau|\theta) \right]$$
Computing $\nabla_\theta \log P(\tau|\theta)$
The only thing left now is to compute $\nabla_\theta \log P(\tau|\theta)$ given our earlier established form
$$P(\tau|\theta) = P(s_0) \prod_{t=0}^T \pi_\theta(a_t|s_t) P(s_{t+1}|s_t, a_t)$$
We take the log
$$\log P(\tau|\theta) = \log P(s_0) + \sum_{t=0}^T \left( \log \pi_\theta(a_t|s_t) + \log P(s_{t+1}|s_t, a_t) \right)$$
And then the gradient w.r.t. $\theta$
$$\nabla_\theta \log P(\tau|\theta) = \underbrace{\nabla_\theta \log P(s_0)}_{0} + \sum_{t=0}^T \left( \nabla_\theta \log \pi_\theta(a_t|s_t) + \underbrace{\nabla_\theta \log P(s_{t+1}|s_t, a_t)}_{0} \right)$$
As we realize that the initial state distribution $P(s_0)$ and the environment dynamics $P(s_{t+1}|s_t, a_t)$ do not depend on $\theta$, and in turn their gradients are 0, we can simplify to
$$\nabla_\theta \log P(\tau|\theta) = \sum_{t=0}^T \nabla_\theta \log \pi_\theta(a_t|s_t)$$
The Policy Gradient Theorem
Substituting back into the gradient of the objective:
$$\nabla_\theta J(\theta) = \mathbb{E}_{\tau \sim \pi_\theta} \left[ \left( \sum_{t=0}^T \nabla_\theta \log \pi_\theta(a_t|s_t) \right) G_0 \right]$$
But we can generalize this to any time step $t$ (since the return $G_t$ depends on future rewards):
$$\nabla_\theta J(\theta) = \mathbb{E}_{\tau \sim \pi_\theta} \left[ \sum_{t=0}^T \nabla_\theta \log \pi_\theta(a_t|s_t) G_t \right]$$
This is the Policy Gradient Theorem, which forms the basis of many RL algorithms and tells us how to compute the gradient of the expected return with respect to the policy parameters.
Monte Carlo Estimation of the Gradient
Since we can't compute the expectation exactly, we sample trajectories $\tau$ from the policy $\pi_\theta$ and approximate the gradient
$$\nabla_\theta J(\theta) \approx \frac{1}{N} \sum_{i=1}^N \sum_{t=0}^T \nabla_\theta \log \pi_\theta(a_{i,t}|s_{i,t}) G_{i,t}$$
where
- $N$ = number of sampled trajectories
- $a_{i,t}$ = action taken at time $t$ in trajectory $i$
- $G_{i,t}$ = return from time $t$ in trajectory $i$
The REINFORCE Algorithm
The REINFORCE algorithm uses this gradient estimate to update the policy:
- Sample a trajectory $\tau = (s_0, a_0, r_0, s_1, a_1, r_1, \dots, s_T, a_T, r_T)$ using $\pi_\theta$.
- Compute returns $G_t$ for each time step $t$.
- Update the policy using gradient ascent:
$$\theta \leftarrow \theta + \alpha \sum_{t=0}^T \nabla_\theta \log \pi_\theta(a_t|s_t) G_t$$
where $\alpha$ is the learning rate.
Intuitively we can understand the derived formula such as
- $\nabla_\theta \log \pi_\theta(a_t|s_t)$ tells us how to change $\theta$ to increase the probability of action $a_t$ in state $s_t$.
- $G_t$ tells us how good the return was after taking action $a_t$.
Hence, the product $\nabla_\theta \log \pi_\theta(a_t|s_t) G_t$ means:
- If $G_t$ is positive (good outcome), we increase the probability of $a_t$ in $s_t$.
- If $G_t$ is negative (bad outcome), we decrease the probability of $a_t$ in $s_t$.
Implementing REINFORCE
As we've become comfortable with the mathematical intricacies of Policy Gradients and the REINFORCE algorithm, we want to proceed with the implementation of it.
The Environment
Before implementing parts of the algorithm, we need to create a gymnasium environment we'd like to solve.
CartPole-v1, Acrobot-v1 and LunarLander-v3 Gymnasium Environments
# Choose an environment
env_id = "CartPole-v1"
# env_id = "Acrobot-v1"
# env_id = "LunarLander-v3"
# Create the environment
env = gym.make(env_id, render_mode="rgb_array")
observation_space_dim = env.observation_space.shape[0]
action_space_dim = env.action_space.nIn addition, we need to make ourselves familiar with the observation and action space of the environment. These will be the dimensions our Policy Network is going to work with.
The Policy Network $\pi_\theta$
Next, we implement our policy network $\pi_\theta$, outputting the action probabilities for the given state.
class PolicyNetwork(nn.Module):
def __init__(self, state_dim, action_dim, hidden_dim=16):
super(PolicyNetwork, self).__init__()
self.fc1 = nn.Linear(state_dim, hidden_dim)
self.fc2 = nn.Linear(hidden_dim, action_dim)
def forward(self, x):
x = self.fc1(x)
x = F.relu(x)
x = self.fc2(x)
x = F.softmax(x, dim=-1)
return x
# Create a policy network instance
policy_net = PolicyNetwork(observation_space_dim, action_space_dim)Taking an Action $a_t$
We defined the environment, we defined the policy network $\pi_\theta$. To take an action, we sample from our policy network $\pi_\theta$ given the current state $s_t$
def select_action(state, policy_net):
state = torch.FloatTensor(state)
probs = policy_net(state) # Get the action probabilites from policy
dist = Categorical(probs) # Create categorical distribution over the actions
action = dist.sample() # Sample an action from the categorical distribution
log_prob = dist.log_prob(action) # Derive the log probability of the selected action
return action.item(), log_probOur method yields both the action taken and the log probabilities of it for the gradient update later on.
Calculating the Returns $G_t$
For each action $a_t$ taken, we receive a reward $r_t$. These rewards are then used to calculate the total return $G_t$ of each step $t$, discounted by $\gamma$.
def compute_returns(rewards, gamma=0.99):
returns = []
R = 0
# Process rewards in reverse order
for r in reversed(rewards):
R = r + gamma * R # Discounted return at step t
returns.insert(0, R) # Insert at beginning to maintain order
returns = torch.FloatTensor(returns)
# Normalize returns to reduce variance
returns = (returns - returns.mean()) / (returns.std() + 1e-8)
return returnsSampling a Trajectory $\tau$
Now that we have all the distinct parts, we compose them to sample one full trajectory $\tau$ from the environment using our policy network $\pi_\theta$.
def sample_trajectory(env, policy_net):
states, actions, rewards, log_probs = [], [], [], []
state, _ = env.reset()
done = False
steps = 0
# Run until episode ends or max steps are reached
while not done and steps < env.spec.max_episode_steps:
# Select an action based on the current state
action, log_prob = select_action(state, policy_net)
# Take the action in the environment
next_state, reward, terminated, truncated, _ = env.step(action)
# Store the trajectory
states.append(state)
actions.append(action)
rewards.append(reward)
log_probs.append(log_prob)
# Update the state
state = next_state
done = terminated or truncated
steps += 1
return states, actions, rewards, log_probsThis method yields all the visited states, all the actions taken in each state, the rewards received and the log probabilities of each action.
Training the Agent
The only thing left to do is define how the agent is being trained. We iterate through a number of episodes, for each generating a distinct trajectory.
For each trajectory generated, we use the log probability of actions and multiply by the returns to get our gradient.
def train_reinforce(env, policy_net, num_episodes, gamma=0.99, lr=0.01):
optimizer = torch.optim.Adam(policy_net.parameters(), lr=lr)
for episode in range(num_episodes):
# Sample a full trajectory
states, actions, rewards, log_probs = sample_trajectory(env, policy_net)
# Compute returns
returns = compute_returns(rewards, gamma)
# Compute policy loss
policy_loss = []
for log_prob, R in zip(log_probs, returns):
# REINFORCE : -log_prob * return
policy_loss.append(-log_prob * R)
# Sum up the loss
policy_loss = torch.stack(policy_loss).sum()
# Update policy
optimizer.zero_grad()
policy_loss.backward()
optimizer.step()
# Print progress
if episode % 10 == 0:
print(f"Episode {episode}, Total Reward: {sum(rewards):.2f} {'Solved' if sum(rewards) >= env.spec.reward_threshold else ''}")
return policy_netThe gradient is then backpropagated through our policy network $\pi_\theta$ to improve the policy wrt. the experience gathered by the trajectory.
-log_prob * R comes from the fact that we're doing gradient ascent (maximizing) rather than gradient descent (minimizing).PyTorch does minimization by default, hence we need to negate to achieve maximization.
Evaluating the Agent
After we've successfully trained our agent, we most likely want to see how it performs. For our gymnasium environment selection we can even generate a video of our agents performance.
def evaluate(env, policy_net):
# Wrap environment to record a video
env = RecordVideo(env, video_folder=f"videos", name_prefix=f"{env.spec.id}")
state, _ = env.reset()
total_reward = 0
done = False
# Run until the episode ends
while not done:
# Select an action based on our policy
with torch.no_grad(): # Do not track gradients in evaluation
action, _ = select_action(state, policy_net)
# Take action in environment
next_state, reward, terminated, truncated, _ = env.step(action)
total_reward += reward
state = next_state
done = terminated or truncated
print(f"Total Reward: {total_reward:.2f}")
env.close()We use torch.no_grad() to disable gradient tracking during evaluation.
Seeing the Result
If all goes well, we can marvel at the performance of our trained agent(s).
CartPole-v1
Acrobot-v1
LunarLander-v3
Next Steps
This implementation provides a solid foundation for understanding Policy Gradient methods in deep reinforcement learning.
While REINFORCE is a simple and effective algorithm, there are of course several ways to improve both the implementation and the algorithm itself.
- We might want to add a baseline (like a value function) to reduce variance in the gradient estimates.
- We might move one step further and extend this approach to an Actor-Critic model which combines policy gradients with value function learning.
- We could implement different exploration strategies such as $\epsilon$-greedy exploration or add entropy-regularization for better state space exploration
- We should furher, explore more advanced algorithms such as Proximal Policy Optimization (PPO), SAC (Soft Actor-Critic), DQN (Deep Q-Networks), and many more.
The full source code alongside explanations is available on Codeberg in a simpler, less serious, educative style interactive Jupyter Notebook.