Advanced Feature Attribution Techniques for Deep Learning Models
Explainable AI: Exploring various techniques built to shed light on predictions made by deep learning neural networks.
Deep learning models, particularly those in computer vision (CNNs, Vision Transformers), natural language processing (Transformers, xLSTM), and tabular data (MLPs, Gradient-Boosted Trees), have achieved remarkable performance across domains. However, their opaque decision-making processes, often referred to as the "black box" problem, pose significant challenges in high-stakes applications such as healthcare, finance, autonomous systems, and legal decision-making.
Explainable AI (XAI) seeks to demystify model predictions by providing human-interpretable insights into how inputs influence outputs.
While there are multiple dimensions of explainability, such as explaining via the input space, explaining by example (Nearest neighbor examples, prototypes, influence functions), explaining by concepts (Testing with Concept Activation Vectors, concept bottleneck models), or explaining model behaviour (partial dependence plots, SHAP values), this post focuses on advanced input space explanations.
Input space explanations aim to answer:
- Which parts of the input (pixels, words, features) were most influential in the model's decision?
- How do small perturbations in the input affect the output?
- Can we visualize or quantify the importance of input components?
Gradient-Based Techniques — Attribution via Backpropagation
Gradient-based methods exploit the differentiable nature of deep neural networks to compute how each input feature affects the output. These techniques are model-agnostic within differentiable architectures (CNNs, Transformers, MLPs) and provide fine-grained, pixel-level or token-level explanations.
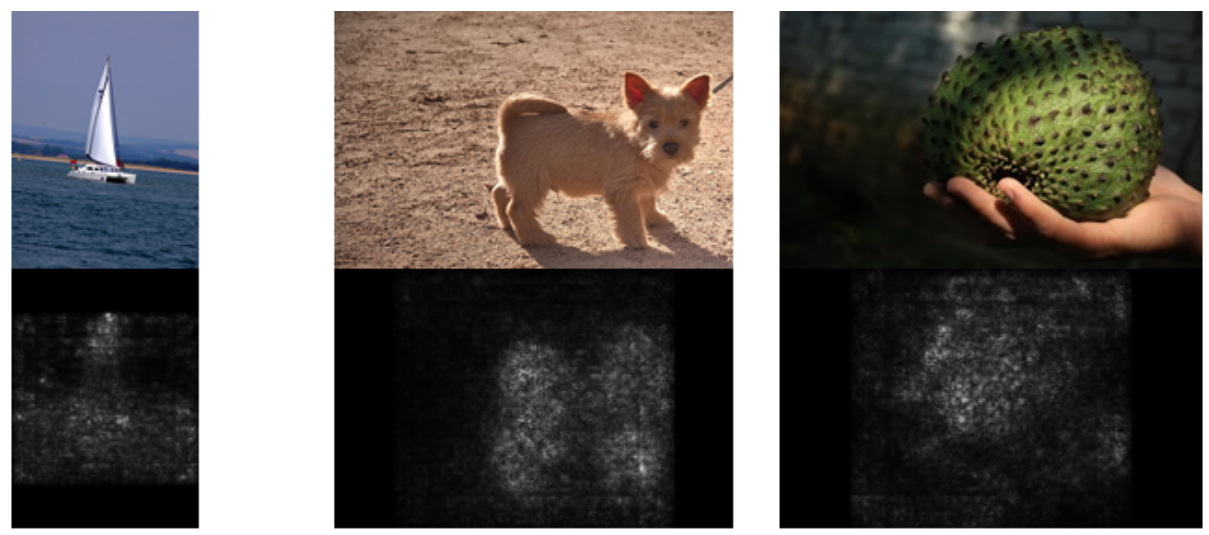
Saliency Maps
Saliency maps compute the gradient of the output with respect to the input, highlighting regions where small changes would most significantly alter the prediction.
Intuitively, steep gradients indicate high sensitivity, meaning those input features are crucial for the decision.
Given an input $x$, a model $f$, and a target class $c$, the saliency map $S$ can be defined as:
$$S(x) = \left| \frac{\partial f_c(x)}{\partial x} \right|$$
where
- $f_c(x)$: Model’s confidence score for class $c$.
- $\frac{\partial f_c(x)}{\partial x}$: Gradient of the output w.r.t. the input.
Algorithm
- Perform a forward pass to compute $f_c(x)$
- Compute the gradient wrt. to the input $\nabla_x f_c(x)$ via backpropagation
- Take the absolute value (or square) to measure magnitude
Saliency Maps are simple and efficient methods to gain insight into any differentiable model, providing fine-grained importance scores on an input feature level.
On the other hand, Saliency Maps often suffer from gradient saturation, as deep networks often have near zero gradients due to ReLU/sigmoid activations. Additionally, Saliency Maps tend to be noisy as absolute gradients may highlight rather irrelevant high-frequency patterns.
Grad-CAM (Gradient-Weighted Class Activation Mapping)
Grad-CAM improves upon saliency maps by focusing on higher-level feature maps (e.g., last convolutional layer in CNNs) rather than raw input gradients.
It weights feature maps by their gradient importance and aggregates them into a coarse heatmap.
For a CNN, let $A^k$ be the activation map of the $k$-th feature in the final convolutional layer. The Grad-CAM heatmap $L_{Grad-CAM}$ is:
$$L_{Grad-CAM} = \text{ReLU}\left( \sum_k \alpha_k A^k \right)$$
where the importance weight $\alpha_k$ is:
$$\alpha_k = \frac{1}{Z} \sum_i \sum_j \frac{\partial f_c(x)}{\partial A_{ij}^k}$$
- $Z$: Normalization constant (number of pixels).
- $\text{ReLU}$: Applied to keep only positive influences.
Algorithm
- Perform a forward pass to get $f_c(x)$ and feature maps $A^k$.
- Compute gradients $\nabla_{A^k} f_c(x)$ via backpropagation.
- Global average pooling of gradients to get $\alpha_k$.
- Weighted sum of feature maps, followed by ReLU.
Grad-CAM improves upon Saliency Maps by yielding less noisy attribution maps as it operates on higher-level features.
However, as the final heatmap is upsampled to the input size, some fine details are lost in the process, in turn it might miss small but critical features. Additionally, Grad-CAM is not applicable to fully connected layers but relies on convolutional feature maps.
Integrated Gradients
Gradient-based attribution methods often lack a clear baseline input for comparison, leading to arbitrary or incomplete explanations, a problem known as the reference problem.
Integrated Gradients (IG) fixes this by integrating gradients along a path from a defined baseline (e.g., zero input) to the actual input, ensuring the sum of attributions matches the difference between the model’s output and the baseline (completeness).
For input $x$ and baseline $x'$ (often zero), the attribution $A_{IG}$ is:
$$A_{IG}(x) = (x - x') \times \int_{\alpha=0}^1 \frac{\partial f(x' + \alpha (x - x'))}{\partial x} \, d\alpha$$
The integral is approximated via Riemann sums in practice.
Algorithm
- Choose a baseline $x'$ (e.g., black image, zero embedding, ...)
- Interpolate between $x'$ and $x$ in small steps
- Compute gradients at each step and accumulate
Integrated Gradients is a simple, intuitive attribution method that works with any differentiable model (CNNs, transformers, etc.), avoiding gradient saturation issues.
Unlike complex alternatives like LIME or SHAP, it provides axiomatic guarantees:
- Sensitivity (important features are assured to get non-zero attribution)
- Implementation invariance (consistent explanations for equivalent models)
while satisfying completeness (attributions sum to the prediction difference), which makes it both theoretically robust and practical for interpretation.
Notably, computational cost is a weak point, as IG requires the calculation of multiple gradients, and even though it's guaranteed to highlight essential features, it might still highlight irrelevant features.
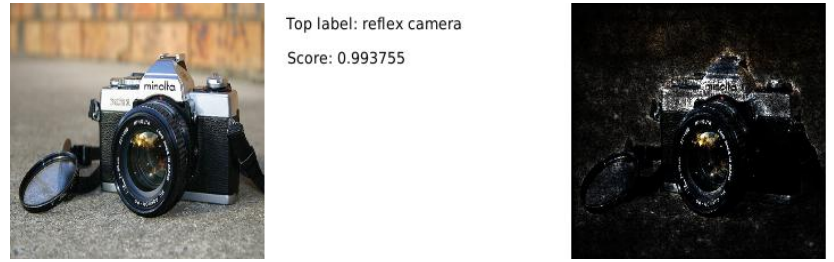
Input X Gradient
Input X Gradient is a simple but effective variant of Saliency Maps which multiplies the input by its gradient, emphasizing both the magnitude of the input and its gradient importance.
Input X Gradient Attribution $A_{\text{Input X Gradient}}$ is defined as
$$A_{\text{Input X Gradient}}(x) = x \odot \frac{\partial f_c(x)}{\partial x}$$
where $\odot$ denotes the element-wise (Hadamard) product.
Input X Gradient improves upon Saliency Maps, while still being simpler than other discussed techniques such as Integrated Gradients or Grad-CAM, however, it still suffers from gradient saturation and does not give theoretical guarantees like Integrated Gradients.
Gradient SHAP (Gradient SHapley Additive exPlanations)
Gradient SHAP merges SHAP (SHapley Additive exPlanations), a framework rooted in cooperative game theory that assigns fair feature contributions by computing Shapley values (the average marginal impact of a feature across all possible feature coalitions) with gradient-based approximations.
Instead of exhaustively evaluating all coalitions, it efficiently estimates Shapley values by sampling gradients along paths from a baseline input, blending SHAP’s theoretical rigor with the scalability of gradient methods.
The SHAP value for feature $i$ is:
$$\phi_i = \mathbb{E}_{x' \sim p(x')}\left[ \frac{\partial f(x')}{\partial x_i} \cdot (x_i - x'_i) \right]$$
where
- $p(x')$: Distribution over baseline inputs (e.g., mean, random samples).
Approximated via Monte Carlo sampling.
Gradient SHAP connects gradients to Shapley values and positions itself as a model-agnostic explainable AI technique, theoretically grounded in game theory.
Notably, it is however computationally quite intensive as it requires many gradient evaluations and assumes feature independence, which means it may fail if features are correlated.
DeepLIFT (Deep Learning Important FeaTures)
DeepLIFT computes neuron-level contribution scores by comparing the difference in activations between a given input and a reference input (e.g., baseline or neutral example).
Unlike gradient-based methods which rely on derivatives alone, DeepLIFT propagates contributions backward through the network, assigning credit to each neuron while explicitly addressing the gradient saturation problem. This neuron-centric approach ensures more reliable and meaningful attributions.
For a neuron with input $x$ and output $y$, the contribution $C_{\Delta x \Delta y}$ is:
$$C_{\Delta x \Delta y} = \sum_{i,j} \frac{y - y_{ref}}{x_i - x_{i,ref}} \cdot (x_i - x_{i,ref})$$
where $y_{ref}$ is the output at reference input.
Contrary to the other explored methods, DeepLIFT handles gradient saturation better, however, it requires careful reference selection and is more complex to implement.
Layer-wise Relevance Propagation (LRP)
Layer-wise Relevance Propagation is gradient-inspired XAI technique, which explains neural network decisions by backward-passing relevance scores from the output to input features, ensuring the total relevance is preserved.
Unlike gradient-based methods, LRP uses layer-specific rules (e.g., for linear, ReLU, or pooling layers) to distribute importance proportionally to each neuron’s contribution.
LRP generates fine-grained explanations, showing which input regions most influenced the prediction.
While powerful, LRP’s quality depends on propagation rules, and its explanations may still reflect model biases.
For a layer $l$, the relevance $R$ is propagated as:
$$R_i^{(l)} = \sum_j \frac{a_i w_{ij}}{\sum_k a_k w_{kj}} R_j^{(l+1)}$$
where
- $a_i$: Activation of neuron $i$.
- $w_{ij}$: Weight from $i$ to $j$.
- $R_j^{(l+1)}$: Relevance of neuron $j$ in the next layer.
LRP is well-suited for complex architectures, including convolutional neural networks (CNNs) and multi-layer perceptrons (MLPs). It delivers fine-grained, pixel-level interpretability without relying on gradient calculations, instead leveraging activation patterns and network weights to generate explanations.
However, its effectiveness depends heavily on the chosen propagation rules, as different variants can yield inconsistent or conflicting results. Compared to approaches like attention mechanisms or gradient-based methods, the explanations it produces may also feel less intuitive or harder to interpret.
Attention-Based Techniques — Leveraging Model-Inherent Focus
Attention mechanisms provide a natural way to interpret model decisions by highlighting which parts of the input the model focuses on at each step. While not always faithful, attention weights offer intuitive and efficient explanations.
Self-Attention Visualization
In Transformer models (BERT, ViT, LLMs), self-attention weights indicate how much each token (or patch) attends to every other token. By visualizing these weights, we can see which input elements influence each other.
For a single attention head, the attention weights $A$ are:
$$A = \text{softmax}\left( \frac{Q K^T}{\sqrt{d_k}} \right)$$
where
- $Q$: Query matrix (from input embeddings)
- $K$: Key matrix
- $d_k$: Dimension of key vectors
Algorithm
- Extract attention weights from a trained Transformer
- Average across heads (or analyze per head)
- Visualize as a heatmap (for text) or image overlay (for Vision Transformers)
Visualizing self-attention poses itself as an attractive feature attribution technique as it requires no additional computation (uses existing model weights), feels very intuitive, especially with the "attention" framing and works for multi-model models (e.g. CLIP or DALL-E).
However, as also noted in literature, Attention != Causation, hence attention visualizations are not necessarily faithful as the model may use the retrieved weights differently than only would expect. In addition, the multi-head attention is not guaranteed to learn patterns which make sense to be interpreted on their own or in combination with others, hence can be hard to interpret.
Attention Rollout
Since self-attention is recursive, Rollout aggregates attention weights across all layers to show long-range dependencies. It computes a joint attention graph by multiplying attention matrices sequentially.
For $L$ layers, the cumulative attention $R$ is:
$$R = A^{(1)} \cdot A^{(2)} \cdot \ldots \cdot A^{(L)}$$
where $A^{(l)}$ is the attention matrix at layer $l$.
Attention rollout effectively models complex relationships between tokens, offering a richer and more accurate representation than shallow (single-layer) attention mechanisms.
However, the model suffers from a combinatorial explosion of possible attention paths, making computation inefficient. Additionally, interpreting and visualizing attention patterns becomes increasingly difficult as sequence length grows.
Attention Gradients
While attention weights show where the model looks, attention gradients reveal how important those weights are for the final prediction. This combines attention and gradient-based methods.
The importance of attention weight $A_{ij}$ is:
$$I_{ij} = A_{ij} \cdot \frac{\partial f(x)}{\partial A_{ij}}$$
This approach offers a more accurate representation of attention compared to raw attention mechanisms by incorporating gradient-based importance. Additionally, it is highly versatile, as it can be applied to any model that relies on attention mechanisms.
One major drawback is its high computational cost, since it requires backpropagation through the attention components. Furthermore, while it improves upon traditional methods, it is not flawless and may still overlook certain dependencies in the data.
Permutation-Based Techniques — Measuring Impact via Perturbations
Unlike gradient or attention methods, permutation-based techniques measure importance by observing how output changes when input features are perturbed. These are model-agnostic and work even for non-differentiable models (e.g., Random Forests, Gradient-Boosted Trees).
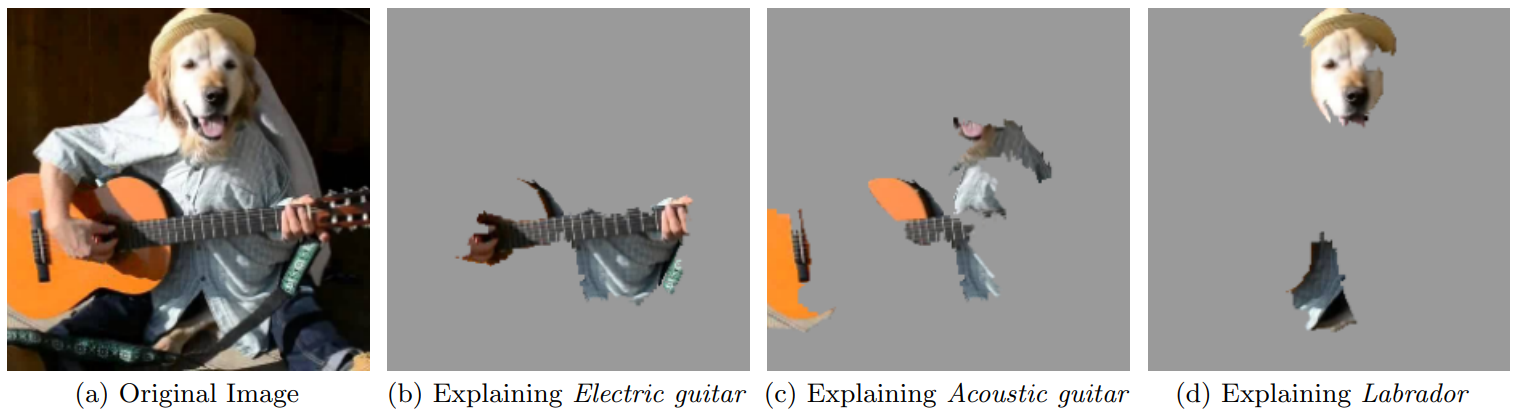
LIME (Local Interpretable Model-agnostic Explanations)
LIME explains a single prediction by fitting a simple, interpretable model (e.g., linear regression) to perturbed versions of the input. The feature weights in this local model serve as explanations.
Algorithm
- Generate perturbed samples $x'$ around $x$ (e.g., by randomly masking words in text or superpixels in images).
- Get predictions $f(x')$ for perturbed samples.
- Fit a weighted linear model $g$ to approximate $f$ locally:
$$g(z) = w_0 + \sum_i w_i z_i$$
where
- $z$: Binary vector indicating presence/absence of features.
- $w_i$: Explanation weights (importance of feature $i$).
LIME is highly versatile, as it can be applied to any type of classifier without modification. Its explanations are intuitive and easy for humans to grasp, thanks to the simplicity of the underlying linear model. Additionally, it is adaptable across different data types, including text, images, and structured tabular data, making it widely applicable in various domains.
However, the explanations produced can be inconsistent, as they heavily rely on the chosen perturbation approach during analysis. The technique also becomes computationally expensive when dealing with high-dimensional data, such as images, due to the increased processing demands. Furthermore, it tends to focus on local behavior, which means it may overlook broader, global patterns in the data that could provide deeper insights.
Occlusion Sensitivity
Occlusion sensitivity systematically hides (occludes) parts of the input and measures how much the prediction changes. Regions causing large drops in confidence are deemed important.
Algorithm
- Slide a mask (e.g., gray patch for images, [MASK] for text) over the input.
- Record the change in prediction confidence.
- Generate a heatmap of importance scores.
This approach is straightforward and easy to use, requiring no gradient calculations, making it compatible with any model. Additionally, it can be applied to various different data types, including images and text.
Unfortunately, it demands significant computational resources due to repeated forward passes. The choice of mask size can impact performance, as overly large or small masks may overlook important details, and additionally, it may struggle to detect intricate feature interactions.
SHAP (SHapley Additive exPlanations)
SHAP (SHapley Additive exPlanations) explains machine learning predictions by assigning each feature a Shapley value, a concept from game theory that fairly distributes credit among contributors. For a given feature, SHAP calculates its average impact on the model’s output by considering all possible feature coalitions (subsets of features that either include or exclude it).
A feature coalition is simply any combination of features working together. For example, if a model uses features $\text{A}$, $\text{B}$, and $\text{C}$, coalitions could be $\{\text{A}\}$, $\{\text{B}, \text{C}\}$, or even the empty set $\{\}$. SHAP measures how much adding a specific feature (e.g., $\text{A}$) changes the prediction when combined with every possible coalition of the remaining features.
The SHAP value for feature $i$ is:
$$\phi_i = \sum_{S \subseteq F \setminus \{i\}} \frac{|S|! (|F| - |S| - 1)!}{|F|!} \left( f(S \cup \{i\}) - f(S) \right)$$
where
- $F$: Set of all features.
- $S$: Subset of features excluding $i$.
- $f(S)$: Model prediction with features in $S$.
SHAP is theoretically robust, providing a unique, fairness-guaranteed solution. Additionally, it’s model-agnostic, meaning it works with any ML algorithm while maintaining consistency.
However, it struggles with high-dimensional data due to computational costs. It also assumes independent features, which can lead to unreliable results when variables are correlated.
Some Open Challenges
While explainable AI (XAI) has made substantial strides in recent years, it remains an unsolved challenge with critical open questions. Researchers and practitioners continue to grapple with fundamental limitations that hinder the development of truly transparent and trustworthy AI systems.
Faithfulness vs. Plausibility
One of the most pressing issues in XAI is the tension between faithfulness (whether an explanation accurately reflects the model’s decision-making process) and plausibility (whether the explanation appears reasonable to humans).
Many widely used techniques, such as attention mechanisms in deep learning, often generate interpretations that seem intuitive but may not faithfully represent the model’s inner workings. For instance, an attention heatmap might highlight certain words in a text, but this does not necessarily mean those words were the true drivers of the prediction.
To address this gap, robust evaluation frameworks are essential. Perturbation-based tests (e.g., removing or altering input features to observe changes in output) and controlled human studies can help assess whether explanations are both faithful and meaningful.
Scalability
Another major hurdle is the computational inefficiency of many XAI methods when applied to large-scale models, particularly modern deep learning systems like large language models (LLMs) with billions of parameters. Techniques such as SHAP (SHapley Additive exPlanations) and LIME (Local Interpretable Model-agnostic Explanations), while powerful, become prohibitively expensive as model size grows.
Conclusion
As AI systems become more complex and high-stakes, the demand for rigorous, faithful, and actionable explanations will only grow. Future advancements in neurosymbolic AI, causal reasoning, and human-AI collaboration will further bridge the gap between model opacity and human understanding.